Riemenantriebe bestehen im Allgemeinen aus einem geschlossenen Riemen und zwei Riemenscheiben, einer antreibenden und einer angetriebenen. Es gibt zahlreiche Arten von Riemen auf dem Markt, aber die am häufigsten verwendeten sind: Flachriemen, Rundriemen und Poly-V-Riemen, aber vor allem die Keilriemen, die in den verschiedenen Abschnitten ausgeführt werden: Z-A-B-C-D-E usw. Für Zahnriemen konsultieren Sie die entsprechenden Kapitel, da es sich um formschlüssige Getriebe handelt. Obwohl es sich um unterschiedliche Typen handelt, unterliegen alle Riemen einem einzigen allgemeinen Funktionsprinzip, das die Grundregeln für Konstruktion, Berechnung und Ausführung bestimmt. 1
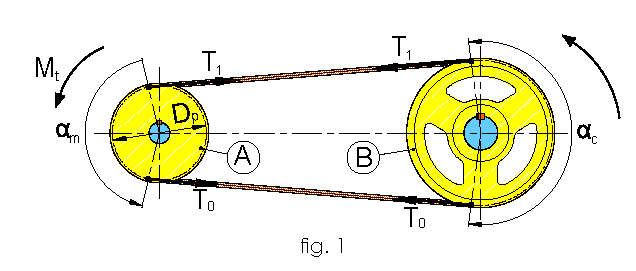
- A = Antriebsriemenscheibe
- B = angetriebene Riemenscheibe
- C = Riemenspanner
- Dp = Wirkdurchmesser der treibenden Riemenscheibe
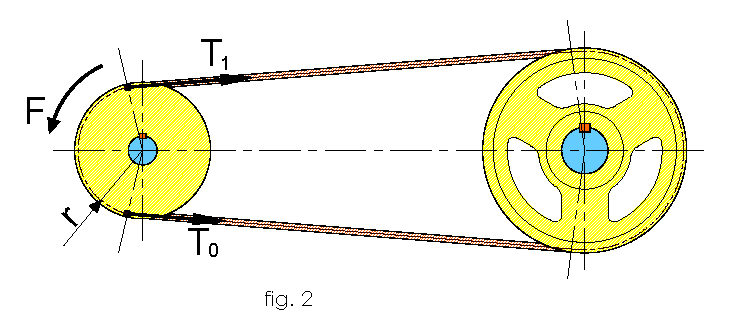
- F = treibende Kraft
- T1 = Spannung am gespannten Ast
- T0 = Spannung am getriebenen Zweig
- Mt = Moment an der Motorwelle
- r = Radius
- αm = Umschlingungswinkel der treibenden Riemenscheibe
- αc = Umschlingungswinkel der angetriebenen Riemenscheibe
Die idealen Einsatzbedingungen sind gegeben durch:
- Korrekte Entwicklung des gespannten Riemens
- Vollständiger Kontakt des Riemens mit den Riemenscheiben bei den Umschlingungswinkeln am und ac
Mit diesen Prämissen ist es offensichtlich, dass die ideale Bedingung zur Gewährleistung eines korrekten Funktionierens mit dem Ausdruck erfüllt sein muss: F ≤ T_1 (Ausdruck a) und dass T1 = T0 (Ausdruck b) Fig. 2
Leider stellen die realen Betriebsbedingungen kritische Probleme dar, vor allem ist das Übersetzungsverhältnis aufgrund unvermeidlicher Fehler oder Unannehmlichkeiten nicht immer garantiert, wie zum Beispiel:
- Falsche Riemenentwicklung
- Niedrige Umschlingungswinkel am (Antriebsscheibe) und ac (Abtriebsscheibe)
- Niedriger Reibungskoeffizient "η" aufgrund direkter oder abgeleiteter Ursachen
- Vibrationen oder intermittierender Betrieb
- Ungenügende Riemenspannung
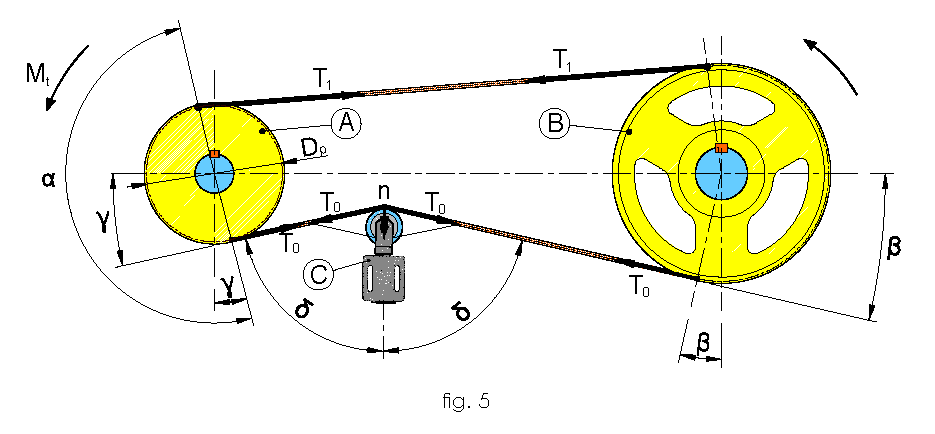
Jede der oben genannten Anomalien kann zu einem Schlupf des Riemens auf den Riemenscheiben und damit zu Betriebsfehlern wie Drehzahlschwankungen und Verringerung des übertragenen Drehmoments führen. Um sie zu beseitigen, muss ein automatischer Riemenspanner verwendet werden, der die Dehnungen ausgleicht, die Vibrationen absorbiert, die Wickelwinkel erhöht, aber vor allem die Spannung des Riemens garantiert; Seine Verwendung erzeugt einen Knoten "n" am Kontaktpunkt der Spannrolle mit dem Riemen, und genau in dieser Position des "Punkts" manifestieren sich die wirkenden Kräfte, die das resultierende T0 und damit T1 erzeugen, die das minimale Gleichgewicht bestimmen Bedingung für die Erzeugung von Bewegung (Fig. 3).

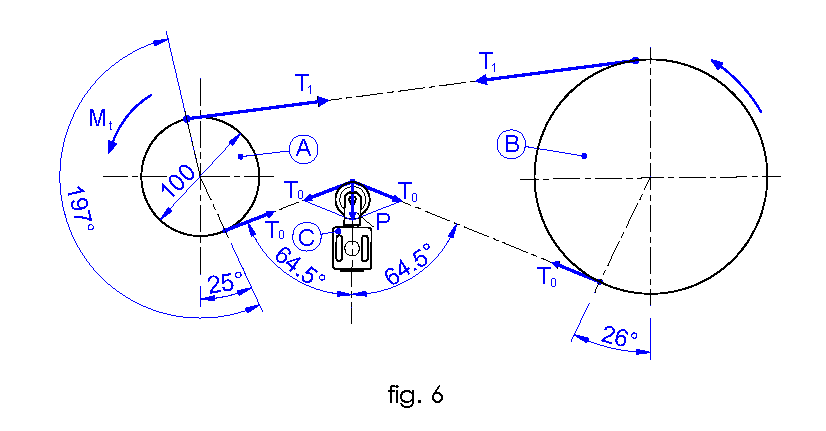
Der Riemenspanner muss anhand der Zugkraft in den beiden Riemensträngen „T1“ und „T0“ ausgewählt werden; und ihr Wert wird berechnet, indem die Gleichungen des Gleichgewichts und der Übertragungsgrenze, die die "Gleichgewichtsgleichung bei der Drehung der Antriebsriemenscheibe" (Ausdruck "c") sind, zusammen mit der "Schlupfgrenzbedingung" (Gleichung "d") geschrieben werden. ; weil der Umschlingungswinkel αm auf der Treibscheibe kleiner als αc ist und auf jeden Fall mindestens 180° betragen muss, was π rad entspricht; Daher ist das System, das die Berechnung der T1- und T0-Lasten ermöglicht, wie folgt:
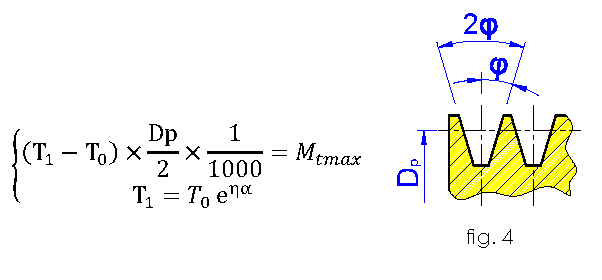
e = Neper-Zahl, konstant gleich 2,72
ɳ = Reibungskoeffizient zwischen Riemen und Riemenscheibe
Mt = Moment an das Regime übermittelt werden
Mtmax = Maximales Moment auf der Motorwelle
fs = Betriebsfaktor von 2 bis 5
Wie bekannt ist, haben alle Maschinen kritische Punkte, wie Anläufe oder Arbeitsspitzen, für die es notwendig ist, das zu übertragende Drehmoment "Mt" (siehe nachstehenden Ausdruck "h") mit dem Betriebsfaktor "fs" zu multiplizieren, um zu erhalten das maximale Betriebsdrehmoment "Mtmax" = fs x Mt (siehe Ausdruck "d" unten)

Der Riemenspanner muss auf dem langsamen Ast so nah wie möglich an der treibenden Riemenscheibe installiert werden und eine Kraft entwickeln, die ausreicht, um die Resultierende der Summe der beiden Komponenten des Getriebes des langsamen Astes auszugleichen. Für die korrekte Funktion des Spannelements müssen die Angaben auf Seite 2 beachtet werden. 15 und 16 für die Axialspanner und Seiten 19 und 20 für die Spannschlösser. Für den korrekten Betrieb des Gurtstraffers ist es wichtig, dass er so positioniert wird, dass die Ein- und Austrittswinkel „δ“ am Knoten „n“ gleich sind (Fig.5).
Fig. 5 die korrekte Montage des Spanners auf dem langsamen Zweig des Getriebes zeigt; die Konfiguration ist derart, dass der Riemen, der aus der antreibenden Riemenscheibe herauskommt, einen Winkel von γ Grad in Bezug auf die Vertikale bildet, während auf der angetriebenen Riemenscheibe von β Grad in Bezug auf die Vertikale gebildet wird; dies impliziert, dass die Arbeitswinkel "δ" gleich und gleich sind zu:

Die gerade beschriebenen sind die minimalen Gleichgewichtsbedingungen für das Funktionieren des Riemens; unten stellen wir ein Rechenbeispiel dar.
Angesichts des Wertes der Kraft P können wir den Spanner wählen, er muss in der Lage sein, einen maximalen Schub von mehr als 30% zu entwickeln, damit er in einem Bereich an der Maschine installiert werden kann, für den die Kraft P maximal 2 erfordert /3 seiner Schubkraft, um einen Druck zu erhalten, der die Bewegungsübertragung in einem Zustand des konsolidierten Gleichgewichts garantiert.
Was bisher behandelt wurde, betrifft Riemenantriebe im Idealzustand und unter Berücksichtigung des maximalen Betriebs, d. h. der Bedingungen des "Gleichgewichts"; Die Realität sieht jedoch ganz anders aus und die Arbeitsbedingungen ändern sich ständig in Abhängigkeit von den externen Faktoren, die eingreifen. Wir erwähnen nur die häufigsten:
- Abflüge
- Verhaftungen
- Belastungsspitzen
- Geschwindigkeitsvariation
- Überlastungen
- Fehler in der Riemenentwicklung
- Umweltbedingungen
- Variation der Arbeitstemperatur
- Arbeitszyklen
- Verschleiß der Riemenscheiben
- Verschleiß der Riemen
- Tragebedingungen und Wirkstoffe
- Spezifische Kritikalität
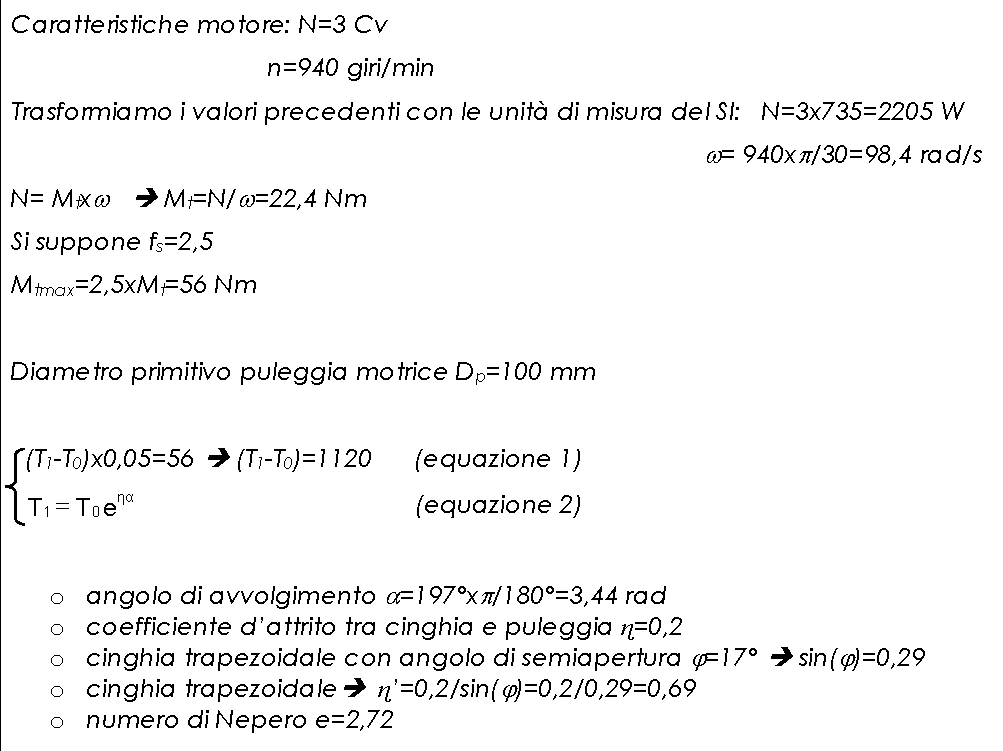
Jeder dieser Vorfälle verändert die Geometrie und den Zustand des Getriebes. Um die Zuverlässigkeit der Maschinen zu erhöhen, ist es daher notwendig, im Voraus einzugreifen, um kritische Probleme zu vermeiden. Anhand einer typischen Riemenübertragung, Fig. 7, können wir feststellen, dass die Bewegung garantiert ist, wenn die Übertragungsgleichungen erfüllt sind; für die die Leistung „N“ (Ausdruck „g“) und das übertragene Drehmoment „Mt“ (Ausdruck „h“) von der Drehzahl „n“ abhängen, für die:

- A = Antriebsriemenscheibe
- B = angetriebene Riemenscheibe
- C = Riemenspanner
- r = Radius = b (Arm)
- T1 = Spannung am gespannten Ast
- T0 = Spannung am getriebenen Zweig
- F= treibende Kraft
- Mt = Moment an der Motorwelle
- P = vom Riemenspanner erzeugte Kraft
- P1 = Reaktion
Das Drehmoment Mt ist auch gegeben durch: Mt = F x b (Ausdruck „i“)
wobei F = Mt/b (Ausdruck "l")
aus diesen Ausdrücken geht hervor, dass die Gleichgewichtsbedingung durch F ≤ T1 dargestellt wird, da T1 = T0 F ≤ T0 (Ausdruck "m")
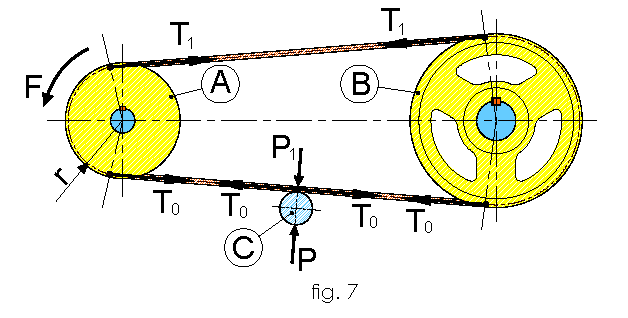
Die Anwendung des Gurtstraffers erzeugt einen Knoten "n", in dem die beteiligten Kräfte auftreten; die die Geometrie des Getriebes modifiziert; Aufgrund der vom Riemenspanner erzeugten Kraft "P" bewegen die beiden Riemenzweige den Knoten "n" nach oben bis zum Gleichgewichtszustand von P1, der die Reaktion auf P ist und den Winkel "β" zwischen den beiden Zweigen bildet des Gürtels; auf diesen Vektoren müssen sich die Gleichgewichtskräfte des Systems manifestieren Fig. 8.
Um die Stärke des einzusetzenden Gurtstraffers zu bestimmen, muss das Parallelogramm der Kräfte des Systems mit den Winkeln β, α und ϱ konstruiert werden, die aus dem Gleichgewichtszustand aufgrund der Wirkung der Kraft P hervorgehen Fig. 8.
Da die Kraft "F" für den Bewegungsgleichgewichtszustand bekannt ist, bestimmen wir auch T1 und T0 ≥F und können somit den Graphen Fig. 9 und löse folgende Gleichung:
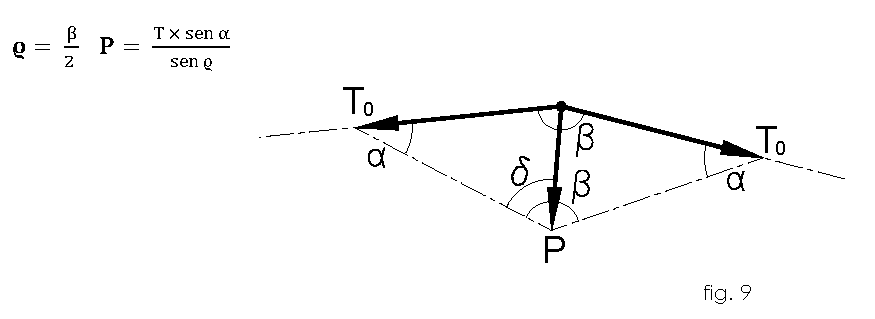
Zusammenfassend ist ein Riemenantrieb dann gewährleistet, wenn der Riemen stets ausreichend gespannt ist und dies durch die Aufteilung der Kraft des Riemenspanners aufrechterhalten wird, der ausgehend vom Winkel β die der Mindestspannung entsprechenden Kräfte T zur Gewährleistung der Kraft erzeugt F.